


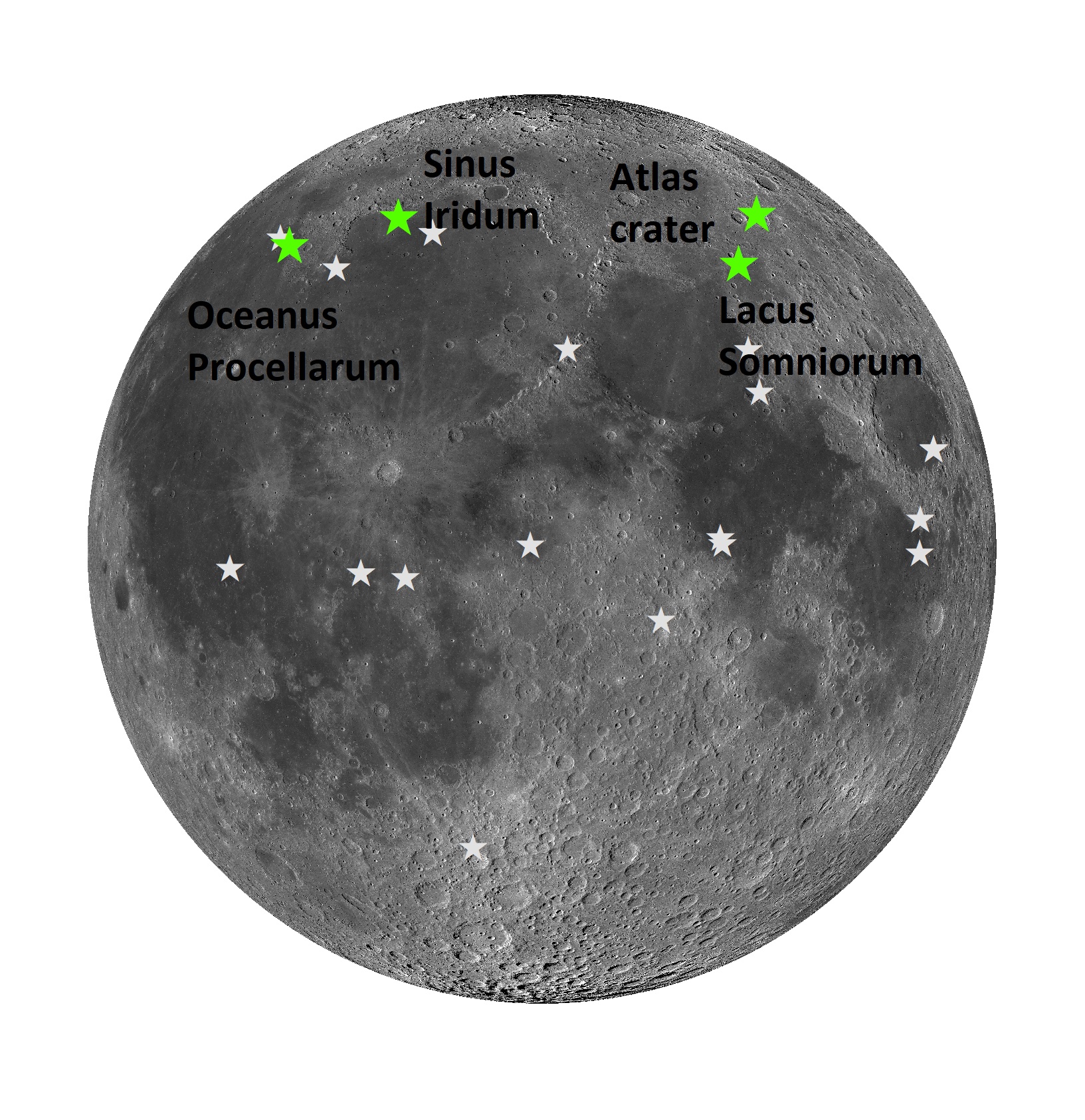
Tego samego dnia, w którym misja statku kosmicznego Orion NASA powróciła na Ziemię, wystartowała nowa misja księżycowa. 11 grudnia 2022 roku o godzinie 07:38 UTC Falcon 9 Block 5 wystartował z rampy SLC-40 w Cape Canaveral Air Force Base (Floryda) przy użyciu japońskiego modułu HAKUTO-R – konstrukcji europejskiej – oraz księżycowych kostek w latarka NASA. HAKUTO-R przenosi również moduł księżycowy Rashid ze Zjednoczonych Emiratów Arabskich oraz mini-robota JAXA SORA-Q Japońskiej Agencji Kosmicznej. Był to 55. start Falcona 9 w tym roku i 56. SpaceX (licząc misję Falcon Heavy), imponujący rekord. Pierwszy stopień B1073 pomyślnie wylądował na platformie Cape Canaveral LZ-2 po wykonaniu swojej piątej misji. Wydanie pierwotnie zaplanowano na 30 listopada, ale musiało zostać opóźnione z powodu problemów z programem uruchamiającym. HAKUTO-R ma wylądować na powierzchni Księżyca pod koniec kwietnia w kraterze Atlas na półkuli północnej po bliższej stronie Księżyca. Jeśli się powiedzie, stanie się pierwszą japońską sondą, która miękko wyląduje na Księżycu i pierwszym prywatnym statkiem kosmicznym, który dotrze na powierzchnię Księżyca.

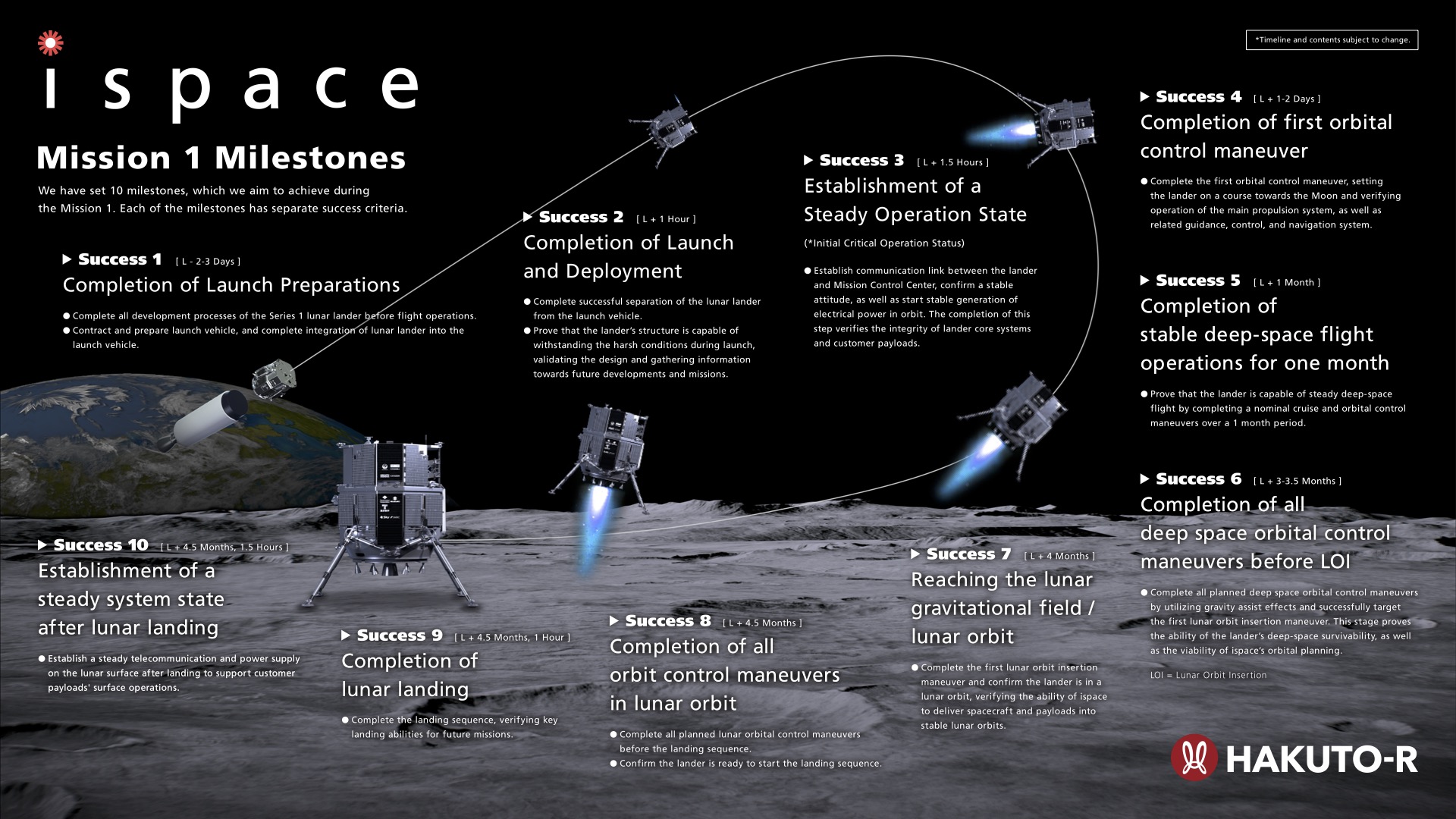
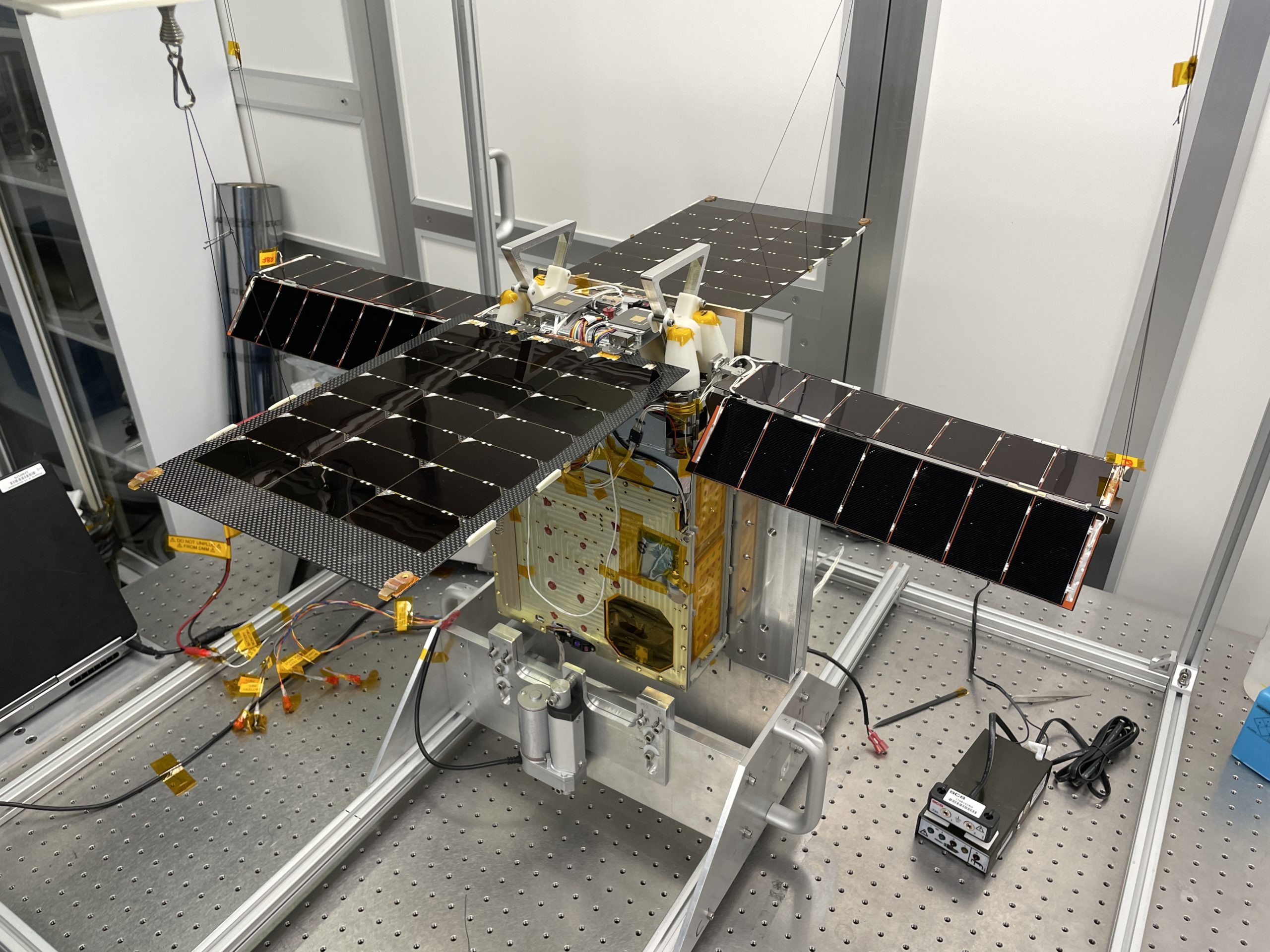
Misja HAKUTO-R 1 (M1) jest odpowiedzialna za japońską prywatną firmę ispace Inc. (Nie mylić z chińską firmą startową iSpace). Moduł księżycowy HAKUTO-R M1 został zbudowany w Niemczech w obiektach ArianeGroup w Lampoldshausen, natomiast integracja odbyła się w obiektach IABG (Industrieanlagen- Betriebsgesellschaft mbH) w Ottobrunn. HAKUTO-R to moduł księżycowy o suchej masie 340 kg, wysokości 2,27 m i średnicy 2,61 m z rozłożonymi goleniami podwozia. Układ napędowy składa się z silnika głównego i sześciu silników pomocniczych u podstawy statku, napędzanych hiper-propelentami (MMH i NTO). Sterowanie położeniem (RCS) jest zintegrowane z ośmioma małymi pojedynczymi silnikami sterowymi na bazie hydrazyny, umieszczonymi po bokach pojazdu. HAKUTO-R może przenosić na powierzchnię Księżyca ładunek o masie do 30 kg.


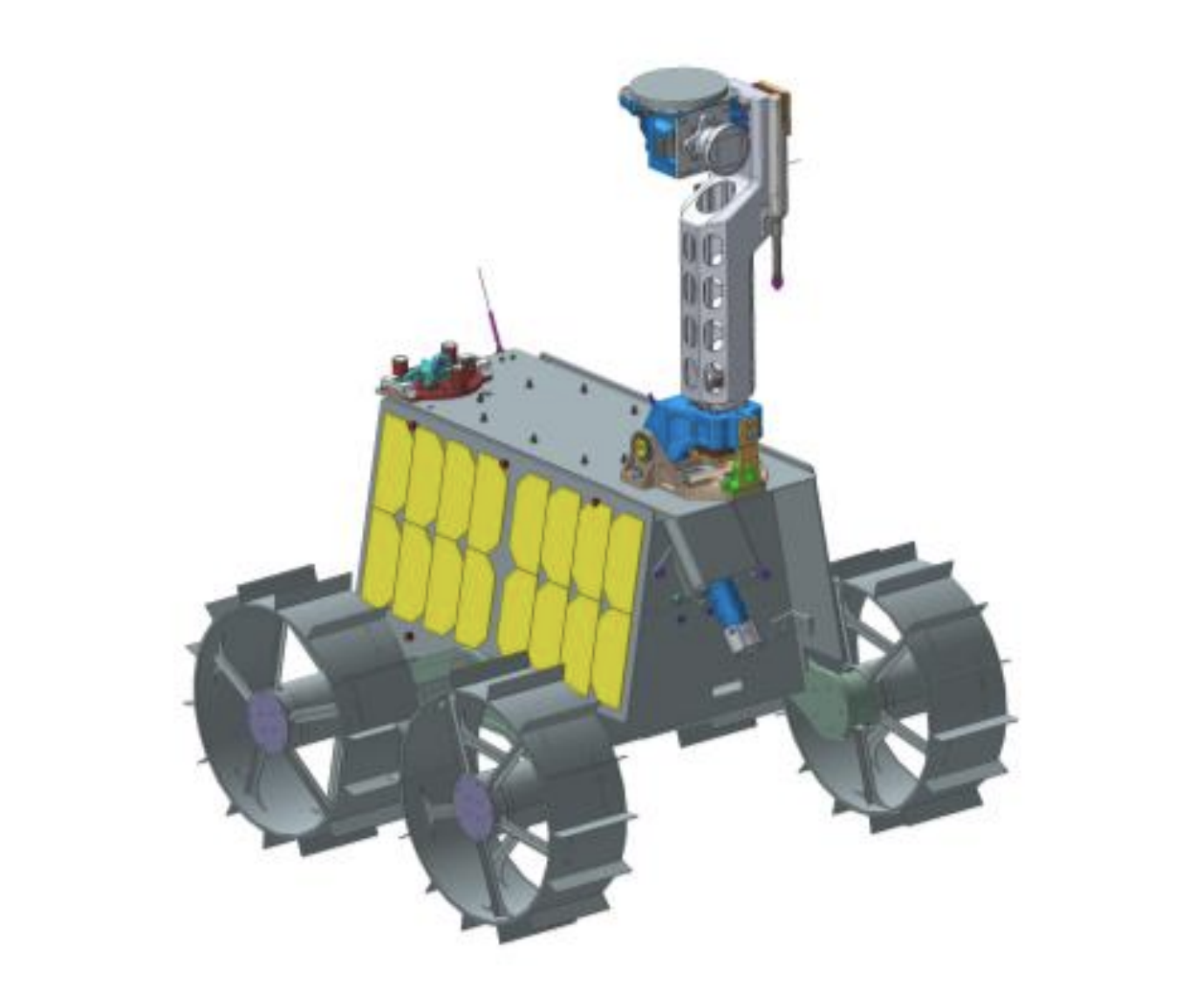
HAKUTO-R przewozi łazik Rashid ze Zjednoczonych Emiratów Arabskich, najmniejszy łazik kołowy, jaki kiedykolwiek toczył się po powierzchni Księżyca. Został nazwany Rashid (Rashid), na cześć zmarłego szejka Rashida bin Saeeda Al Maktouma, a jego oficjalna nazwa to ELM (Misja księżycowa Emirates). Jest to mały czterokołowy pojazd o wadze 10 kg zbudowany pod kierunkiem Centrum Kosmicznego MBR (Centrum Kosmiczne Mohammeda bin Rashida). Rashid zawiera trzy francuskie kamery CASPEX, kamerę z mikroskopem regolitowym do zbliżeń (CAM-M), małą kamerę na podczerwień (CAM-T, o rozdzielczości 80 x 64 pikseli i polu 38 x 31 stopni) oraz cztery plazmy Langmuira (CAM-T).LNG) i inercyjna jednostka pomiarowa (IMU) do kontrolowania trajektorii łazika. Dwie francuskie krzywki CASPEX są zamocowane i umieszczone odpowiednio z przodu iz tyłu łazika, a trzecia znajduje się na końcu rozkładanego masztu. Posiadają sensor CMOS i mają pole widzenia 85 stopni oraz rozdzielczość 2048 x 2048 pikseli. Opracowane przez francuską firmę CNES i firmę 3DPlus kamery CASPEX będą pierwszym francuskim instrumentem na powierzchni Księżyca od pół wieku. Łazik Rashid 2, który będzie jeździł na chińskiej sondzie Chang’e 7, oraz japoński łazik MMX, który będzie zwiedzał powierzchnię Fobosa, będą również wyposażone w kamery CASPEX.

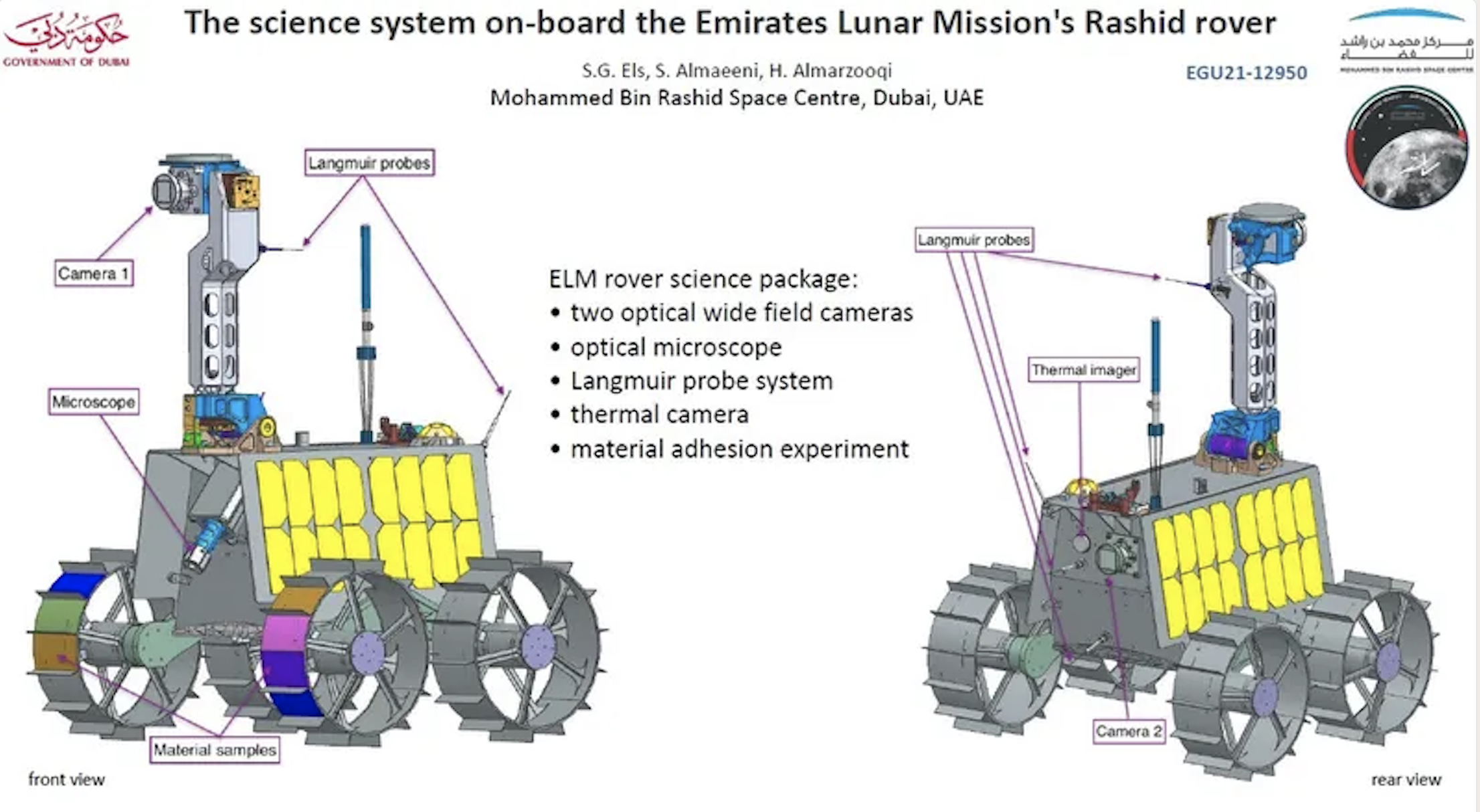



Rashid ma maksymalną prędkość 10 cm na sekundę i jest w stanie pokonywać przeszkody o wysokości 10 cm i nachyleniu do 20 stopni. Rashid zostanie wysłany na powierzchnię Księżyca za pomocą małej, przegubowej platformy z wysięgnikami, systemu podobnego do tego używanego w chińskich modułach księżycowych Yutu i Yutu 2. Jeśli się powiedzie, stanie się piątym automatycznym łazikiem księżycowym poradzieckim. Lunokhod 1 i 2 oraz chińskie Yutu 1 i 2. Oczywiście, w przeciwieństwie do chińskich czy radzieckich łazików, Rashid nie jest zaprojektowany do przetrwania księżycowej nocy i będzie aktywny tylko przez dwa tygodnie.




Wraz z Rashidem, HAKUTO-R niesie małą japońską „wędrującą piłkę” SORA-Q (Sora oznacza „niebo” w języku japońskim). Eksperymentalny robot SORA-Q (ソラキュー) to mała kula, którą można częściowo otworzyć, aby zobaczyć kamerę. Ruch uzyskuje się poprzez poruszanie półkulami, które działają jak koła. Jego masa to zaledwie 250 gramów, a średnica to 8 centymetrów. Takara-Tomy, która pierwotnie produkowała zabawki Transformers, była zaangażowana w projekt, ponieważ nie mogło być inaczej.

Sora-e は から 後 、 「クロール 走行「 バタフライ バタフライ と 名 付け ら た 動き 駆 し て の 砂 レゴリス レゴリス レゴリス レゴリス レゴリス レゴリス レゴリス レゴリス の の て て し し し し し し し し し し し し し しし し pic.twitter.com/gDnE51jaZR
– SORA-Q 【公式】 2022 年度中 に 月 へ 打 ち 上 げ 予 定 の 月 ッ ト (SORAQ_official) 24 października 2022 r
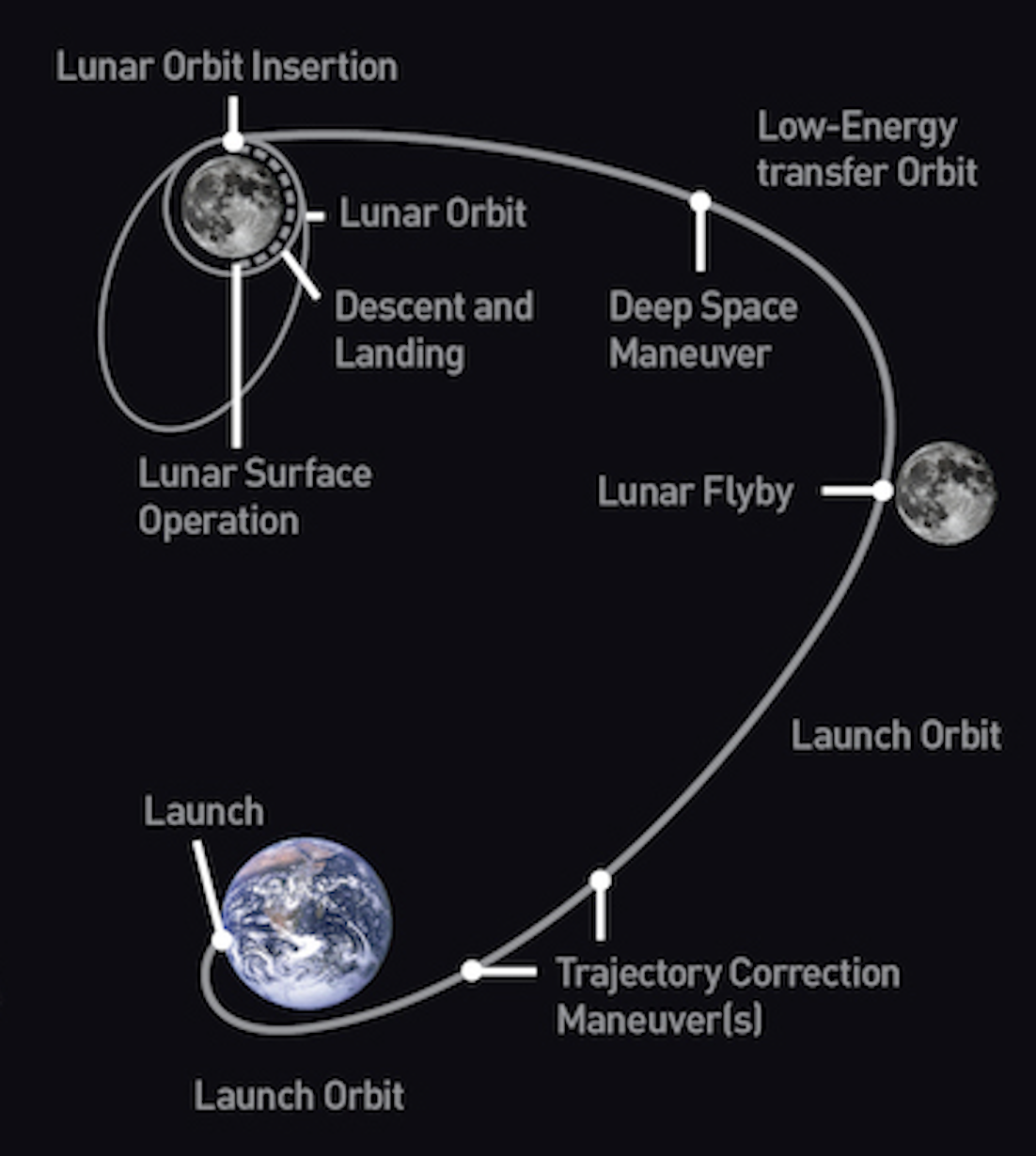
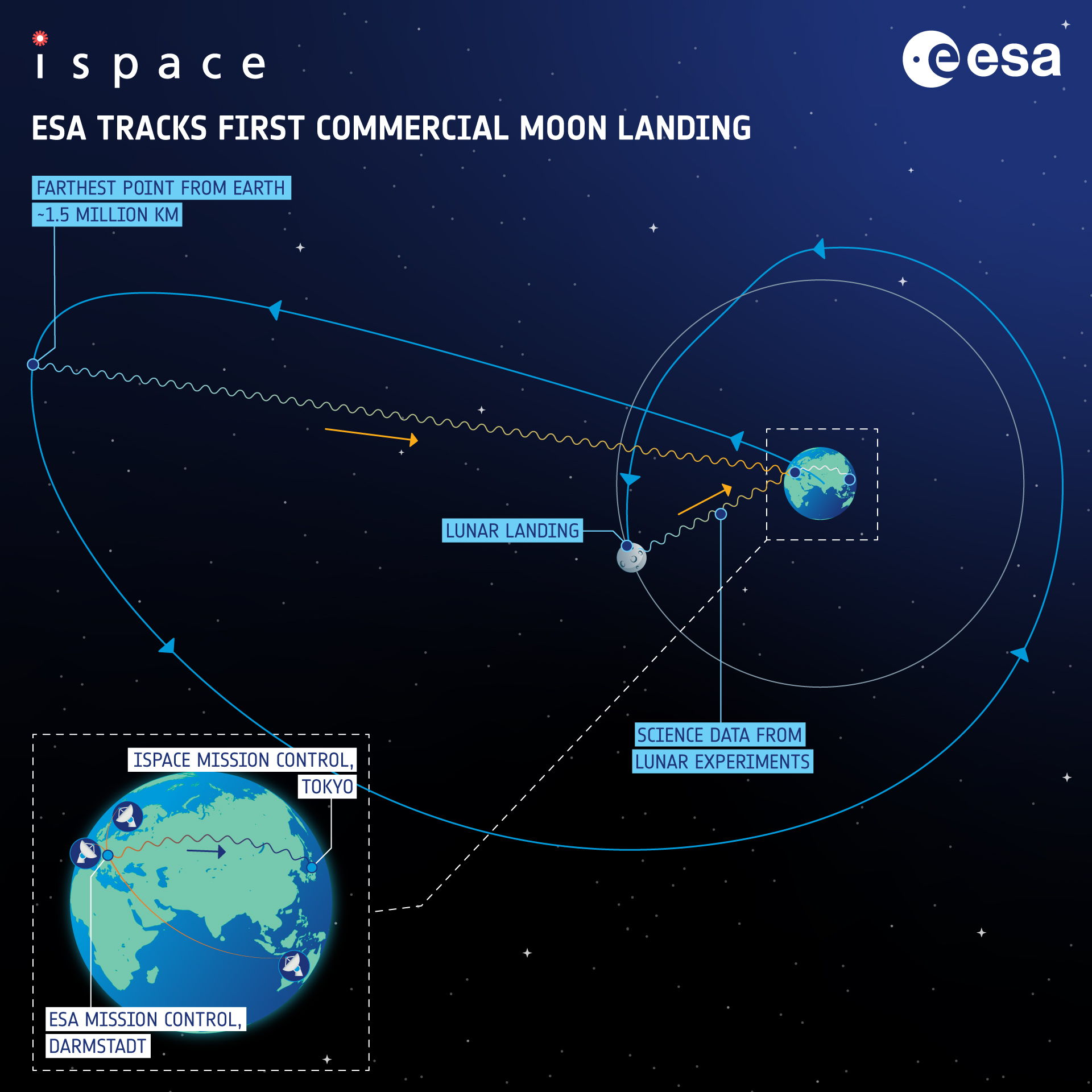
Oprócz statku kosmicznego Rashid i SORA-Q, HAKUTO-R jest wyposażony w kamerę 4K firmy ispace, kolejną panoramiczną kamerę 360 stopni zaprojektowaną przez kanadyjską firmę Canadensys Aerospace Corporation oraz prototyp baterii półprzewodnikowej japońskiej firmy NGK Spark Plug Co., Ltd. . Trzyma w ręku płytę z muzyką japońskiego zespołu Sakanaction oraz tabliczkę z nazwiskami osób, które przekazały pieniądze na rzecz Team Hakuto, kiedy była to inicjatywa Google Lunar X-Prize. HAKUTO-R będzie podążał trajektorią niskoenergetyczną, bardzo podobną do tej używanej przez sondę Danuri z Korei Południowej, która pokona do 1,5 miliona kilometrów, zanim powróci na obwód Księżyca. Powinien wylądować w kraterze Atlas (47,5°N, 44,4°E), znajdującym się na północnej półkuli Bliskiej Ściany. Wybrano ten krater, ponieważ ma płaską powierzchnię z niewielką liczbą skał, ale jednocześnie oferuje interesującą różnorodność geologiczną.

Centrum kontroli misji HAKUTO-R M1 znajduje się w Tokio. Do komunikacji z sondą ispace użyje sieci śledzącej Estrack Europejskiej Agencji Kosmicznej (ESA). Dzięki tej umowie HAKUTO-R będzie mógł komunikować się z Ziemią za pomocą trzech dużych 35-metrowych anten kosmicznych zlokalizowanych w Cebreros (Hiszpania), New Norcia (Australia) i Malargue (Argentyna), a także dwóch innych mniejszych ESA anteny w Gujanie, Francji i Nowej Norcii, a także komercyjna antena na Goonhilly Earth Station.
Niedawno ispace udało się zebrać 200 milionów dolarów od różnych inwestorów, w tym od europejskiej firmy Airbus Ventures. Założycielem i dyrektorem generalnym ispace jest Takeshi Hakamada (袴田武史). Ponieważ HAKUTO-R ma wylądować na powierzchni Księżyca pod koniec kwietnia, moduł księżycowy Nova-C firmy Intuitive Instruments może wyprzedzić harmonogram, chociaż ma wystartować w marcu, ale będzie poruszał się po szybszej trajektorii. Jeśli misja się powiedzie, ispace zamierza wystrzelić misję M2 w 2023 roku z modułem księżycowym podobnym do HAKUTO-R, ale wyposażonym w łazik zaprojektowany przez japońską firmę. W 2024 roku na powierzchnię Księżyca powinny wystartować pierwsze moduły drugiej generacji, zbudowane w USA przez firmę Draper i zdolne do przenoszenia do 500 kg.

W 2008 roku zespół japońskich entuzjastów stworzył inicjatywę Hakuto (ハクト, po japońsku „biały królik”, はくと, która swoją drogą jest również nazwą bardzo popularnej w kraju wschodzącego słońca linii kolejowej), aby wystrzelenie pojazdu łazika na Księżyc w ramach konkursu Google Lunar X-Prize (GLXP), który pojawił się rok temu. Pierwotnie japoński łazik miał zostać wystrzelony jako pasażer z modułem księżycowym Peregrine firmy American Astrobotics, ale później zespół Hakuto zdecydował się połączyć siły z indyjskim Team Indus. Łazik Hakuto miał latać modułem HHK1 Team Indus, a oba zespoły zostały wybrane w grudniu 2017 roku jako jeden z pięciu ocalałych z GLXP. Niestety, w styczniu 2018 r. Google zrezygnował z GLXP, nie wydając ani jednej misji. W tym samym roku firma ispace, założona z zespołu Hakuto, zdecydowała, że wystrzeli kolejnego łazika, Surato, na pokładzie łazika księżycowego Peregrine. Ale w sierpniu 2019 roku ispace zmienił plany i ogłosił, że rozpocznie zupełnie inną nową misję o nazwie HAKUTO-R („R” oznacza Restart). Zamiast łazika, HAKUTO-R będzie teraz zbudowanym w Europie modułem księżycowym.

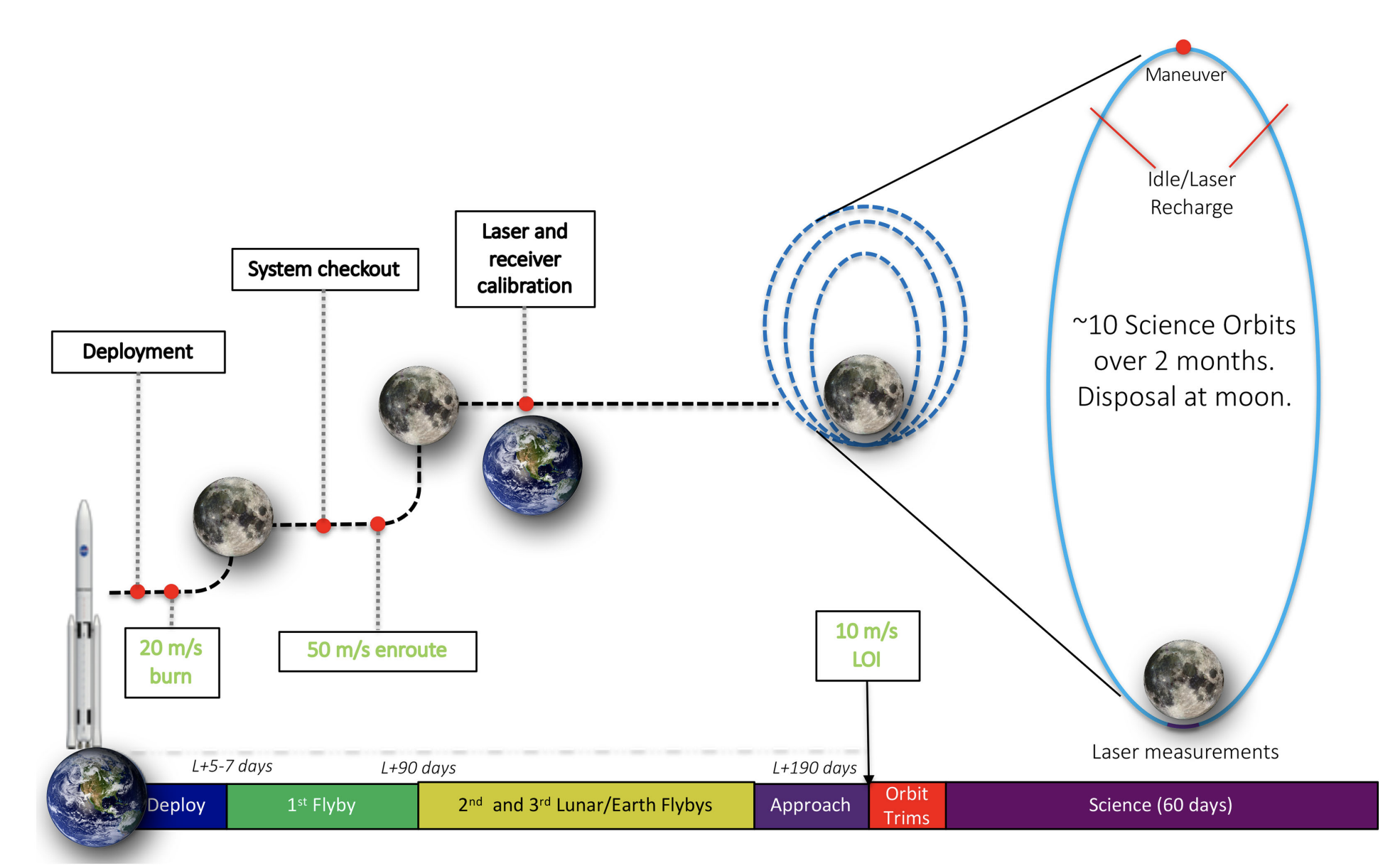
Obok HAKUTO-R była Lunar Flashlight, sześcian NASA 6U opracowany przez JPL (Laboratorium Napędów Odrzutowych) z Kalifornii, który został wybrany w 2014 roku jako część zaawansowanych systemów eksploracyjnych NASA. Ma masę 14 kg i wymiary 12 x 24 x 36 cm. Ma okrążać Księżyc i latać nad biegunem południowym na wysokości zaledwie 12,6 km, aby oświetlać trwale zasłonięte kratery laserami na podczerwień w celu poszukiwania ślady osadów lodowych. Zastosowana moc lasera waha się od 14 do 72 watów (w zależności od długości fali) i ma efektywny wpływ na powierzchnię Księżyca z odległości 35 metrów. Odbiornik to mały teleskop o ogniskowej 7 cm. Oczekuje się, że główna misja potrwa około dwóch miesięcy i obejmie kilkanaście orbit księżycowych. Pierwotnie Lunar Flashlight miał wystartować z misją Artemis I, ale rozwój systemu napędowego Cubesat miał kilka opóźnień i trzeba było znaleźć inną wyrzutnię. Jak na ironię, misja Artemis I ostatecznie wystartowała zaledwie miesiąc przed Lunar Flashlight. Lunar Flashlight wykorzystuje technologie opracowane dla czujników MarCO (MARs CubeSat One), wystrzelony na Marsa w 2018 roku za pomocą InSight.

Jak dotąd w tym stuleciu tylko chińskie sondy Chang’e 3, Chang’e 4 i Chang’e 5 pomyślnie wylądowały na Księżycu. Izraelska sonda Beresheet, również pierwotnie zaprojektowana dla Google Lunar X-Prize, oraz indyjska sonda Chandrayaan 2 tego nie zrobiła. Czy HAKUTO-R odniesie sukces? Za cztery i pół miesiąca będziemy wiedzieć.





„Amatorski praktykujący muzykę. Wieloletni przedsiębiorca. Odkrywca. Miłośnik podróży. Nieskrępowany badacz telewizji.”

:quality(75)/cloudfront-us-east-1.images.arcpublishing.com/elcomercio/G73RL2I77RHUTF4Z247S57H3NM.jpg "MWC 2024: Honor potwierdza przybycie Magic 6 Pro do Peru | Światowy Kongres Mobilny | MWC Barcelona 2024 | Telefony komórkowe | Smartfony | Telefony komórkowe | Wiadomości | Hiszpania | | technologia")

:quality(85)/cloudfront-us-east-1.images.arcpublishing.com/infobae/JCHP4WQPAJE7BLT42T6S57PYRY.jpg "Apple Mexico: to obecnie najczęściej słuchane podcasty")

